Noah Sanz '19
|
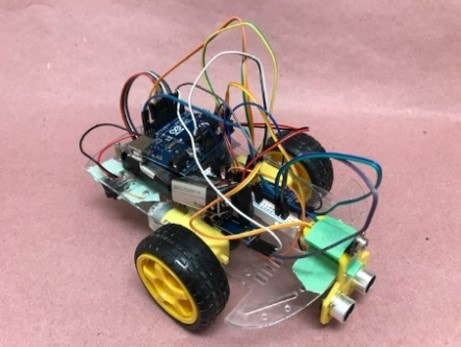
Title: Using an Autonomous Swarm Robot Team to Locate Survivors in a Dangerous Area
Problem: Swarm robotics is a field of study which uses a team of relatively simple robots to complete complex tasks. One application of swarm robot systems that has been researched in the past is search and rescue missions. Swarm robots are ideal for search and rescue because a large group of robots can search an area much faster than a single robot. Additionally, swarm robots are more simple and lower cost than most other robots so they are ideal for searching dangerous areas where they could be damaged or destroyed. Many of the past swarm robot systems for search and rescue, such as the HELIOS System and the Multi-Robot Search and Rescue Team, have been expensive and not ideal for searching dangerous areas. For my project, my goal was to build a new swarm robot system that worked autonomously to search an environment for human life. Activities & Interests: Noah is a National Merit Scholarship finalist, an Eagle Scout, President of the Somers Chapter of Mu Alpha Theta (Math National Honors Society), and a member of the National Honors Society. Noah enjoys watching football, listening to music, and spending time with friends. Noah will be attend Georgia Tech and will major in mechanical engineering. |


|
| WR-JSHS PowerPoint |
| Tri-county Poster |